Nagyobb, gyorsabb, erősebb!
A Dobot CR széria kollaboratív robotkarjai számos ipari munkafolyamat automatizálásában helyt álltak az évek során. Legyen az raklapozás, hegesztés, vagy összeszerelés, a CR széria tagjai között (CR3, CR5, CR7, CR10, CR12, CR16) megtalálhatta a legoptimálisabb megoldást számára.
Azonban az ipar olyan szélsőséges körülményekkel is járhat, melyek során nagy teherbírásra, gyors működésre, és mindezek mellett a szigorú biztonságtechnikai előírásoknak való megfelelésre is szükség van.
A Dobot erre ezekre az igényekre válaszolva alkotta meg kollaboratív robotkarjainak legújabb generációját, a CRA sorozatot, melynek tagjai magukban foglalják a kobotok előnyeit, teljesítményükre vonatkozó paramétereik pedig új magaslatokra törnek. De mi szolgáltatja az új lendületet, egy időtálló konstrukcióhoz?
Továbbfejlesztett belső architektúra és sebesség

Belső új generációs szervó motorjai és innovatív dinamikus algoritmusainak köszönhetően a tengelyek szögsebessége 25%-al megnövekedett, ezek mellett a lassú sebességnél észlelhető rezgés 50%-al csökkent a CR széria tagjaihoz képest.
Fékező rendszere teljesen megújult, mely immár elektromágneses rendszerrel üzemel, így a korábbi 10mm megállási távolság kevesebb mint 1mm-re csökkent! A zsúfolt munkakörnyezet nem jelent többé kihívást a Dobot ipari robotkarjainak számára, mindemellett nem kell aggódnia, hogy a robot kárt tesz önben, vagy munkatársában.
Megújult vezérlő egység, szélesebb feladatkör

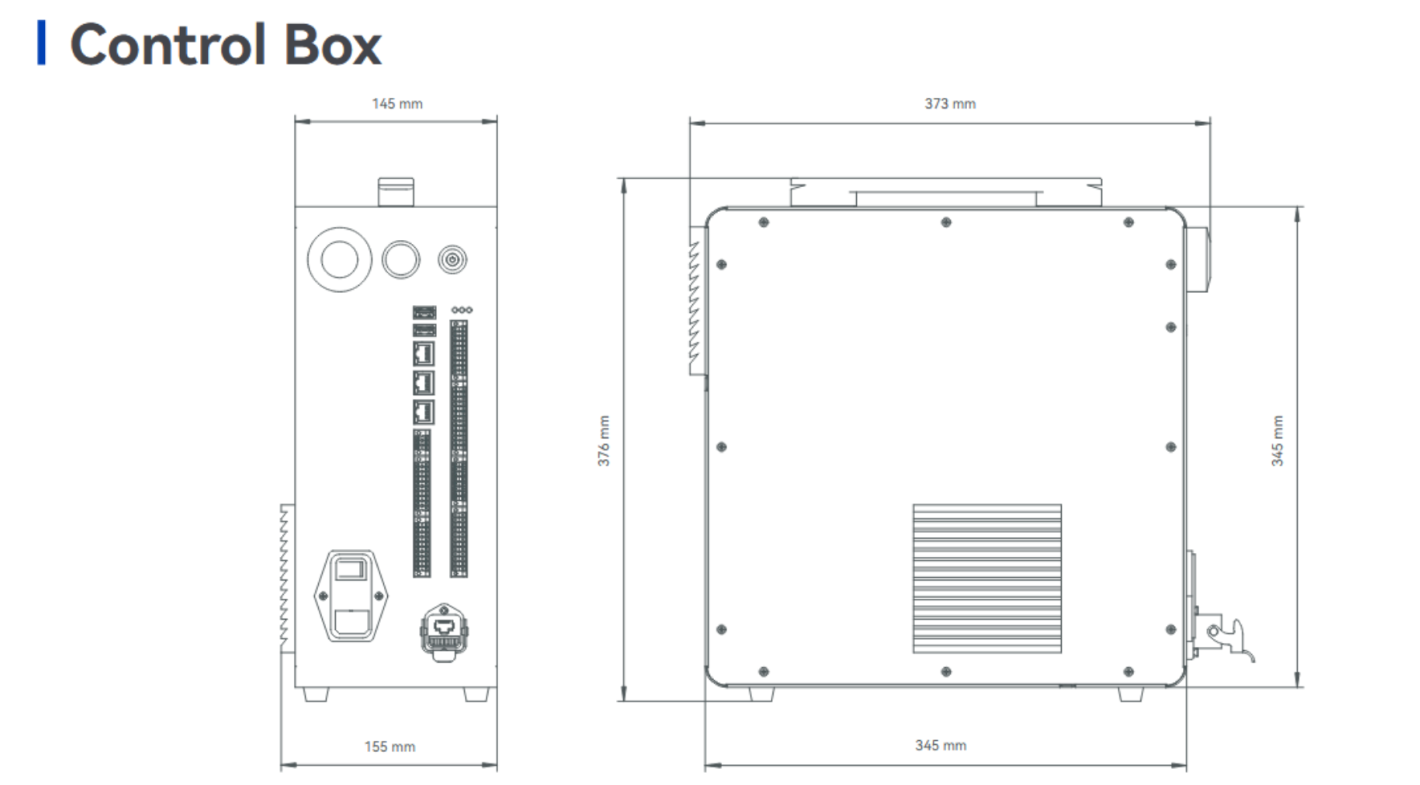
A Dobot ipari kollaboratív robotkarjainak elengedhetetlen tartozéka, a vezérlő egység, mely a robotkar programozására szolgál, és amely által különböző kiegészítőket csatolhat kobotjához.
Az új CC262 vezérlő IO interfésze 24 pinre, kommunikációs interfésze pedig további 1-1 Hálózati, és USB porttal bővült. Ezek mellett a vezérlő rendelkezik RS485 támogatással, súlya 20%-al csökkent, Kommunikációs protokoljai száma duplájára növekedett, zajszintje pedig 20%-al alacsonyabb!
A vezérlő szoftvere 4.x verzión működik, ami teret enged a DobotStudio Pro IDE (Integrated developer Enviroment) folyamatos továbbfejlesztésének. Ezzel a felhasználó felület még letisztultabb, még könnyebben alkalmazható, még gyorsabban értelmezhető frissítéseket szerez.
Új generáció, új modell
A CRA széria legelső modellje az innovatív technológia mellett új paraméterekkel is bővíti a kobotok alkalmazásának lehetőségeit.
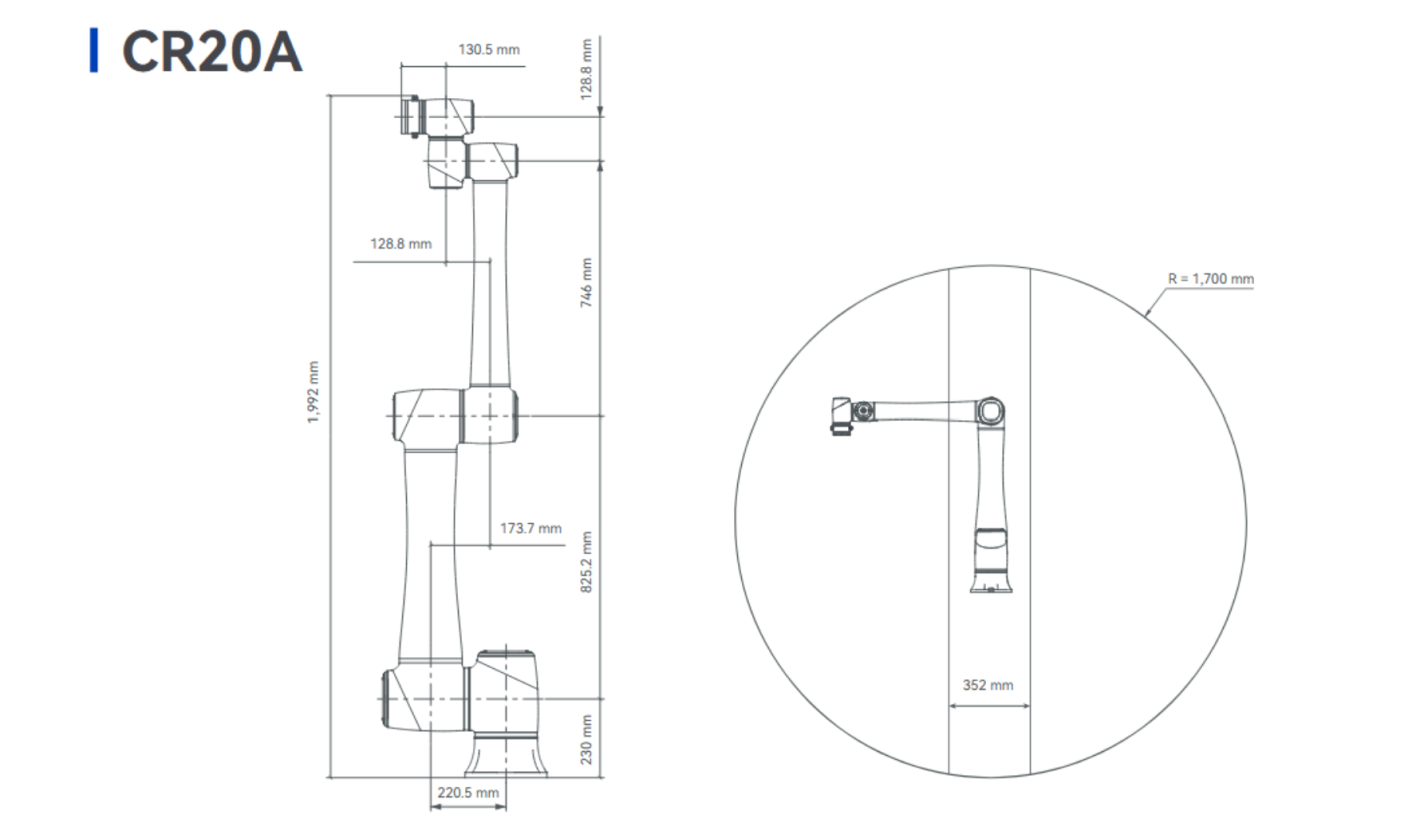
A széria legnagyobb tagjaként mutatkozik be a CR20A, mely a Dobot által gyártott robotkarok eddigi legnagyobb, mintegy 20kg teherbírással, és 1750mm hatótávolsággal nyitja meg a kaput az automatizálás előtt! Ezzel a nehezebb és nagyobb munkadarabokkal végzendő feladatok sem okoznak gondot ipari alkalmazásában,
Ezek mellett a kollaboratív robotkarok minden előnyét megtartva!
Rugalmas telepítés, gyors végrehajtás
A rendszer az előző széria tagjainak megfelelően mindössze 20 perc alatt összeállítható és akár 1 órán belül használatra kész.
Könnyen hozzáférhető, egyszerűen elsajátítható.

A Dobot szoftvere és számtani technológiája intelligenssé és egyszerűvé teszi a robotkar sorozat működését és kezelését. A szoftvernek és a kézi betanításnak köszönhetően pontosan utánozhatja az emberi mozdulatokat. Nincs szükség programozási ismeretekre.
Fejlett biztonsági rendszer, és még több
A kollaboratív robotok előnye, hogy burkolatuk nyomásérzékelő szenzorokkal van ellátva, melyek segítségével ha a nyomás mértéke átlépi a határértéket, a robot megállítja aktuális munkáját, és a rendszer egész addig nem folytatja a folyamatot, míg a nyomás meg nem szűnik. Ezzel a kiegészítéssel az ember-robot munka hatékonysága és biztonságossága is új szintekre tör.
Végszerszámok
A végszerszámok azok az eszközök, amelyek a robotok karjai végére szerelhetők. A DOBOT CRA kollaboratív robot széria végszerszámok széles választékával kompatibilis, így a vállalkozások akár legspeciálisabb igényeinek is meg fog tudni felelni. Legyen az hegesztés, raklapozás, rakodás, csavarozás, szortírozás, összeszerelés, vagy minőség ellenőrzés, bármely folyamatra megtalálhatóak azok a vákuumos vagy elektronikus úton működő megfogók, kommunikációt és automatizálást segítő MODBUS egységek, vagy futószalag és vizuális egység kiegészítők, melyek segítségével a robotkar hatásfoka maximumát képes elérni.
Paraméterek
CR20A kollaboratív robotkar |
Súly | 70kg |
Maximum hasznos teher | 20kg |
Maximum hatótáv | 1700mm |
Maximum végszerszám sebesség | 2m/s |
Ízületek mozgástere | J1 | ±360° |
J2 | ±360° |
J3 | ±165° |
J4 | ±360° |
J5 | ±360° |
J6 | ±360° |
Maximum ízületsebesség | J1/J2 | 120°/s |
J3 | 150°/s |
J4/J5/J6 | 180°/s |
I/O interfész | Tápcsatlakozás | 24V, Hitelesített 2A, maximum 3A |
Portok (2 csatlakozó) | RS485/AI, |
2x DO |
2x DI |
Ismétlési pontosság | ±0.1mm |
IP Szabvány | IP54 |
Zaj | ≤ 70 dB |
Üzemi hőmérséklet | 0~50°C |
Vezérlő csatlakozó kábel hossza | 6 m |
Anyagok | Aluminum, ABS műanyag, szénszálas acél |
CC262 Vezérlő egység |
Súly | 15kg |
Méretek (hossz. x mag. x szél.) | 400mm x 400mm x 175mm |
Feszütség | 100V ~ 240V AC |
IO feszültség | 24V, Max. 3A, Max. 0,5A minden csatornára |
I/O Portok | DI / DO | 24 csatorna (NPN és PNP) |
AI / AO2 | 2 csatorna (feszültség vagy áramerősség módban) |
SI / SO | 10 csatorna (5 sorozat biztonsági tulajdonságra konfigurálható) |
Kommunikációs interfész | Ethernet | 2 (TCP/IP, Modbus TCP, Profinet, Ethernet/IP Kommunikációra) |
EtherCAT | A robot külső tengelyeinek irányítására fenntartva |
USB | 2 |
RS485 | 1 (ModbusRTU kommunikációra) |
Üzemi körülmények | Hőmérséklet | 0~50°C |
Páratartalom | 0% - 95% (nem kondenzáló) |
Zaj | ≤ 60 dB |
Távvezérlés | Támogatott |
IP besorolás | Eredeti: IP20 , Opcionális: IP54 |
Hűtés módja | Ventillátor |
Programozás módja | PC, okostelefon (Android és IOS) |
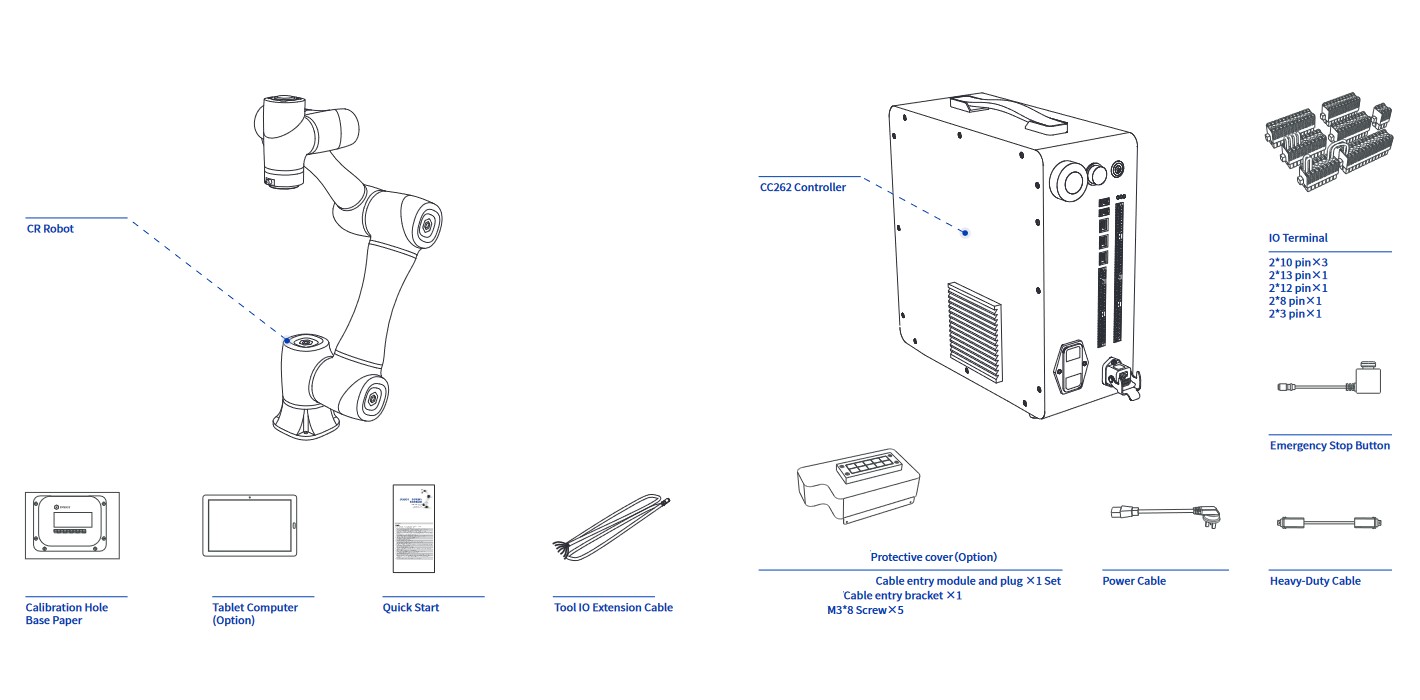
Csomag Tartalma
6 tengely, 4 mozgási mód
A robotkar 4 módban képes két koordinátapontot összekötve eljutni A pontról B pontba:
Joint Interpolated Motion (Csukló interpolált mozgás): A mozgás GO és MoveJ programmal valósítható meg, melynek köszönhetően a végszerszám pozícióját nem figyelembe véve, a robotkar csuklói szögét interpolálva állítja át pozícióját A pontból B pontba
Linearly Interpolated Motion (Lineársan interpolált mozgás): A mozgás Move programmal valósítható meg, melynek köszönehtően a robot, égszerszáma helyzetét vizsgálva köti össze A pont és B pont koordinátáit, mely egyenesen végigvezeti a végszerszámot. A lineáris mozgás esetén megkülönböztethető a jump mód használata, mely során a végszerszám a két koordináta pontjait vagy végállásig mozgatja, vagy a pont koordinátáit figyelembe véve lekerekítést akalmaz a folyamatos mozgás kivitelezéséhez.
ARC -Circular Interpolated Motion (Körkörösen interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével egy ív mentén köti össze, így egy íves mozgást végrehajtva, melynél a végszerszám pozícióját veszi figyelembe
Circle - Circular Interpolated Motion (Kör alakzatban interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével összekötve egy kör alakzatot leírva végzi mozgását, a végszerszám pozícióját figyelembe véve.
Programozása több módon is megvalósítható. Ilyenek például:
Végszerszám mozgásának reprodukciója: Ehhez kapcsolódó programozási mód a Teach & Playback programozás, mely a robotkarok programozásának azon módja, melynél nincs szükség programozási ismeretre egy feladat paramétereinek beállításához. A programozó egy biztonsági zárat feloldó gombot nyomva tartva szabadon mozgathatja a robotkart, majd a gombot elengedve stabilizálhatja azt az adott pozícióban. A programozó felületen ezeket a koordinátákat megtekinthetjük, majd el is raktározhatjuk egy olyan koordináta pontként, melyet a robotkarnak érintenie kell feladata végrehajtása közben. A pontok elmentésével így bármilyen programozói szaktudás nélkül képesek a robotkar mozgatására.
Blokk alapú programozás (Drag and Drop): Más néven grafikus programozás, mely az egyes függvények, változók, és működési módok vizualizálásával könnyíti a programozás elsajátítását. Működési elve a blokkok összekötésén alapul, vagyis az egyes függvényeket reprezantáló blokkokat sorbakötve egymás után, programozni tudjuk a robotkar működését.
Python Script: Manapság az egyik legnagyobb népszerűségnek örvendő Python programozási nyelv minden kezdő programozó első választása. Könnyen értelmezhető szintaktikája és megannyi könyvtára miatt nemcsak az automatizálási folyamatokra, de mesterséges intelligenciák megalkotására is alkalmazzák. Így tehát a robotika is a Python nyelvet választotta a robotok képességeinek maximális kihasználására.
A DobotStudio, mely a robotkar fejlesztői környezete, alapértelmezetten rendelkezik a robotkar irányításához szükséges könyvtárakkal, így nincs más dolguk, mint áttekinteni a dokumentációkat, és megalkotni saját Python programukat robotkarjuk működéséhez.

Koordináta rendszerek
A robotkar rendszer koordináta rendszere négy koordináta rendszerre van osztva:
Bázis koordináta rendszer: A bázis koordináta rendszere a végszerszám koordinátáit, pozícióját és mozgását határozza meg, a bázis koordináta rendszere alapján, melyet a derékszögű koordinátarendszer határoz meg.
Csukló koordináta rendszer: A csuklók koordináta rendszerét az egyes csuklók mozgái lehetőségi határozza meg
Végszerszám koordináta rendszere: Az eltolás távolságát és forgási szögét meghatározó koordináta-rendszer, amelynek origója és orientációi a robotlapon elhelyezkedő munkadarab helyzetétől függően változnak
Felhasználói koordináta rendszer: Mozgatható koordináta-rendszer, amelyet olyan berendezések, mint a berendezési tárgyak, munkapadok ábrázolására használnak. Az origó és a tengelyek tájolása a helyszíni követelmények alapján határozható meg, a munkaterületen belüli pontadatok mérése és a feladatok kényelmes elrendezése érdekében.