DOBOT COBOT CR5
Kollaboratív ipari robotkar

A Dobot CR5 az ipari kobotok közepes méretosztályába tartozik, kompakt mérete és 5kg teherbírása lehetővé teszi a széleskörű gyártásautomatizálást a robotkar segítségével. Számtalan fajtájú és felhasználási területű végszerszám érhető el hozzá, ezáltal az ipar minden területén kimagaslóan hasznos eszköz. Ezen felül szakképzési, felsőoktatási segédeszközként is kiválóan használható, raktározási, gyártásszimulációs és számtalan más területen.
RUGALMAS TELEPÍTÉS, GYORS VÉGREHAJTÁS

Javítsa a munkafolyamat rugalmasságát és a termelés hatékonyságát egy könnyen telepíthető CR kollaboratív robot használatával, melyet mindössze 20 perc alatt össze tud állítani és akár 1 órán belül már használni is tud. Az irányító konzol bekötése és a robotkar rögzítése után, csupán össze kell kötnie a két eszközt, majd bekapcsolnia a rendszert.
KÖNNYEN HOZZÁFÉRHETŐ, EGYSZERŰEN ELSAJÁTÍTHATÓ

A Dobot szoftvere és számtani technológiája intelligensé és egyszerűvé teszi a CR kollaboratív robot sorozat működését és kezelését. A szoftvernek és a kézi betanításnak köszönhetően pontosan utánozhatja az emberi mozdulatokat. Nincs szükség programozási ismeretekre. Ezt elősegíti blokk alapú fejlesztői környezete, mely segítségével nincs szükség a bonyolult programozási könyvtárrendszerek és funkciók alkalmazásának megtanulására.
Abban az esetben ha rendelkezik előzetes programozói tudással, a robot rendszere támogatja a Python programozási nyelvet, így a robot minden előnyét kihasználhatja.
Fejlett biztonsági rendszer, és még több

A kollaboratív robotok előnye, hogy burkolatuk nyomásérzékelő szenzorokkal van ellátva, melyek segítségével ha a nyomás mértéke átlépi a határértéket, a robot megállítja aktuális munkáját, és a rendszer egész addig nem folytatja a folyamatot, míg a nyomás meg nem szűnik. Ezzel a kiegészítéssel az ember-robot munka hatékonysága és biztonságossága is új szintekre tör.
Bővíthető, kompatibilis
A CR kollaboratív robot sorozat a végszerszámok széles választéka mellett az univerzális kommunikációs interfészek miatt is ajánlott. A több I/O és kommunikációs interfésszel rendelkező CR kobot sorozat széles körben bővíthető és kompatibilis a karok végére való számos eszközzel. Ennek eredményeként a CR kobotok sokféle igényt kielégítenek és különféle alkalmazási helyzetekben használhatók.
Biztos befektetés, kimagasló megbízhatóság
A CR kollaboratív robot kar széria erős és stabil építési minősége akár 32000 órányi élettartamot ígér, mindemellett alacsony üzemi költség is jellemzi. Ezáltal a CR széria tagjai nem csak biztos, hanem egyúttal megtérülő befektetések is.
Főbb jellemzői:
| Terméknév | DOBOT CR5 |
| Súly | 25kg |
| Maximum hasznos teher | 5kg |
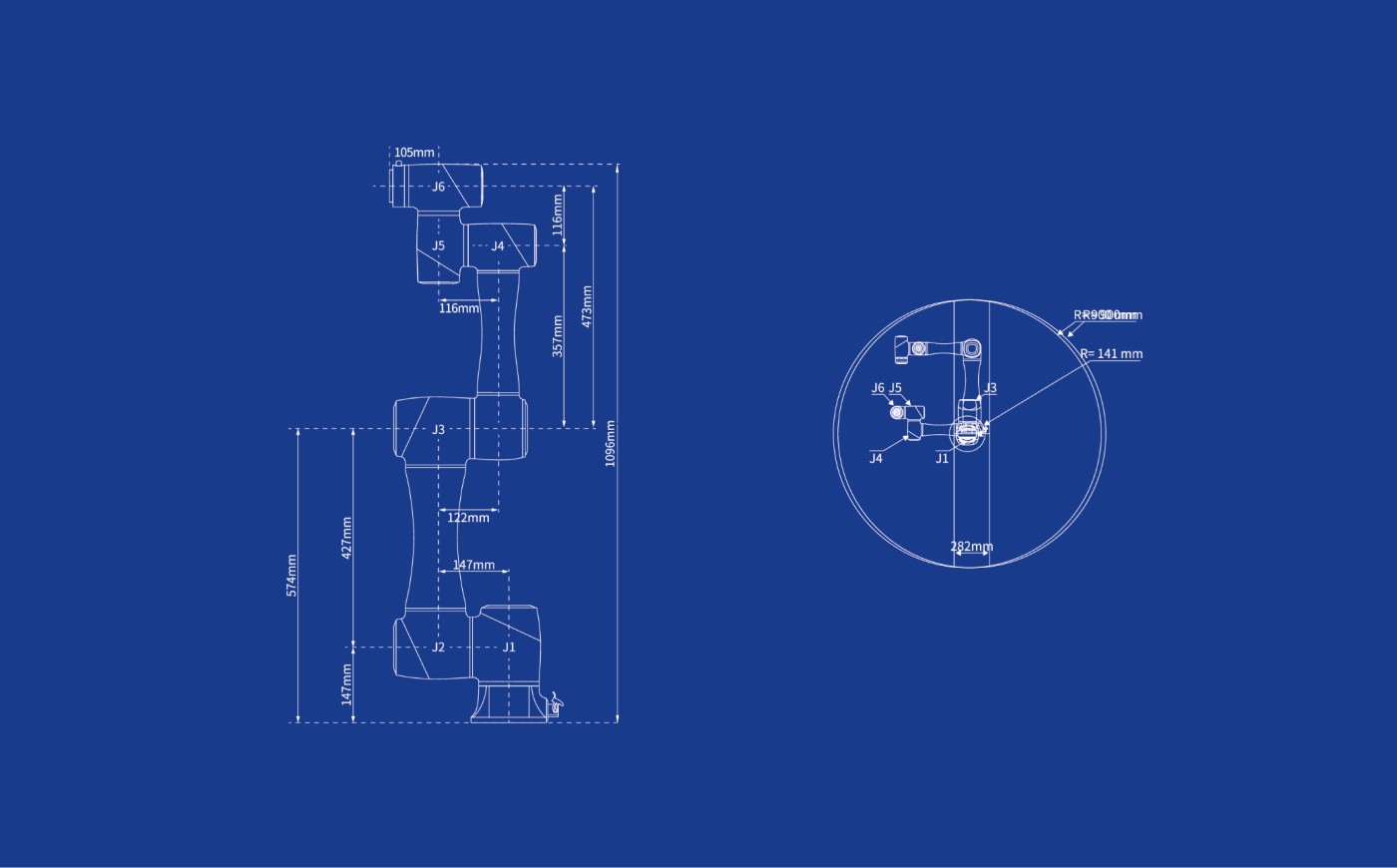
| Maximum hatótáv | 1096mm |
| Névleges feszültség | DC48V |
| Maximum végszerszám sebesség | 3m/s |
| Ízületek mozgástere | J1 | ±360° |
| J2 | ±360° |
| J3 | ±160° |
| J4 | ±360° |
| J5 | ±360° |
| J6 | ±360° |
| Maximum ízületsebesség | J1/J2 | 180°/s |
| J3/J4/J5/J6 | 180°/s |
| Végberendezés I/O interfésze | DI/DO/AI | 2 |
| AO | 0 |
| Kommunikációs interfész | Communication | RS485 |
| Vezérlő I/O | DI | 16 |
| DO/DI | 16 |
| AI/AO | 2 |
| ABZ Incremental Encoder | 1 |
| Ismétlési pontosság | ±0.02mm |
| Kommunikáció | TCP/IP, Modbus, EtherCAT,WIFI |
| IP Szabvány | IP54 |
| Üzemi hőmérséklet | 0~45° |
| Teljesítmény | 150W |
| Anyagok | Aluminum alloy, ABS plastic |
Végszerszámok

A végszerszámok azok az eszközök, amelyek a robotok karjai végére szerelhetők. A DOBOT CR kollaboratív robot széria végszerszámok széles választékával kompatibilis, így a vállalkozások akár legspeciálisabb igényeinek is meg fog tudni felelni.
- Csomagolás és raklapozás
- Kezelés
- Polírozás
- Csavarozás
- Ragasztás, adagolás és hegesztés
- Összeszerelés
- Gépkezelés
- CNC
- Minőség-ellenőrzés
- Fröccsöntés
Csomag Tartalma

A robotkar két egységből áll. Egy robotkarból, illetve a programozásához szükséges vezérlő egységből. A vérzlő egység egy számítógép, melyben a robotkar fejlesztői környezete található. A vezérlő rendelkezik azokkal az IO portokkal, melyekhez a különböző kiegészítők köthetőek, ezekkel együtt a vészleállító kapcsoló is
*A vészleállító kapcsoló megnyomásával a robot azonnal megáll működésében.
A két egység mellett a csomag tartalmazza az egységek tápkábeleit és az összekötéshez szükséges IO kábelt.
*A robotkar Továbbfejlesztett biztonsági rendszerrel is kapható, mely azt a szilikon alapú külső burkolatot foglalja magában, mely segítségével a robotkar már az idegen objektum közelében megáll működésében, így nem megakadályozva, hanem megelőzve a balesetek kialakulását képes hatékonyan elvégezni feladatát.
6 tengely, 4 mozgási mód
A robotkar 3 módban képes két koordinátapontot összekötve eljutni A pontról B pontba:
Joint Interpolated Motion (Csukló interpolált mozgás): A mozgás GO és MoveJ programmal valósítható meg, melynek köszönhetően a végszerszám pozícióját nem figyelembe véve, a robotkar csuklói szögét interpolálva állítja át pozícióját A pontból B pontba
Linearly Interpolated Motion (Lineársan interpolált mozgás): A mozgás Move programmal valósítható meg, melynek köszönehtően a robot, égszerszáma helyzetét vizsgálva köti össze A pont és B pont koordinátáit, mely egyenesen végigvezeti a végszerszámot. A lineáris mozgás esetén megkülönböztethető a jump mód használata, mely során a végszerszám a két koordináta pontjait vagy végállásig mozgatja, vagy a pont koordinátáit figyelembe véve lekerekítést akalmaz a folyamatos mozgás kivitelezéséhez.
ARC -Circular Interpolated Motion (Körkörösen interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével egy ív mentén köti össze, így egy íves mozgást végrehajtva, melynél a végszerszám pozícióját veszi figyelembe
Circle - Circular Interpolated Motion (Kör alakzatban interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével összekötve egy kör alakzatot leírva végzi mozgását, a végszerszám pozícióját figyelembe véve.
Programozása több módon is megvalósítható. Ilyenek például:
Végszerszám mozgásának reprodukciója: Ehhez kapcsolódó programozási mód a Teach & Playback programozás, mely a robotkarok programozásának azon módja, melynél nincs szükség programozási ismeretre egy feladat paramétereinek beállításához. A programozó egy biztonsági zárat feloldó gombot nyomva tartva szabadon mozgathatja a robotkart, majd a gombot elengedve stabilizálhatja azt az adott pozícióban. A programozó felületen ezeket a koordinátákat megtekinthetjük, majd el is raktározhatjuk egy olyan koordináta pontként, melyet a robotkarnak érintenie kell feladata végrehajtása közben. A pontok elmentésével így bármilyen programozói szaktudás nélkül képesek a robotkar mozgatására.
Blokk alapú programozás (Drag and Drop): Más néven grafikus programozás, mely az egyes függvények, változók, és működési módok vizualizálásával könnyíti a programozás elsajátítását. Működési elve a blokkok összekötésén alapul, vagyis az egyes függvényeket reprezantáló blokkokat sorbakötve egymás után, programozni tudjuk a robotkar működését.
Python Script: Manapság az egyik legnagyobb népszerűségnek örvendő Python programozási nyelv minden kezdő programozó első választása. Könnyen értelmezhető szintaktikája és megannyi könyvtára miatt nemcsak az automatizálási folyamatokra, de mesterséges intelligenciák megalkotására is alkalmazzák. Így tehát a robotika is a Python nyelvet választotta a robotok képességeinek maximális kihasználására.
A DobotCRStudio, mely a robotkar fejlesztői környezete, alapértelmezetten rendelkezik a robotkar irányításához szükséges könyvtárakkal, így nincs más dolguk, mint áttekinteni a dokumentációkat, és megalkotni saját Python programukat robotkarjuk működéséhez.

Koordináta rendszerek
A robotkar rendszer koordináta rendszere négy koordináta rendszerre van osztva:
Bázis koordináta rendszer: A bázis koordináta rendszere a végszerszám koordinátáit, pozícióját és mozgását határozza meg, a bázis koordináta rendszere alapján, melyet a derékszögű koordinátarendszer határoz meg.
Csukló koordináta rendszer: A csuklók koordináta rendszerét az egyes csuklók mozgái lehetőségi határozza meg
Végszerszám koordináta rendszere: Az eltolás távolságát és forgási szögét meghatározó koordináta-rendszer, amelynek origója és orientációi a robotlapon elhelyezkedő munkadarab helyzetétől függően változnak
Felhasználói koordináta rendszer: Mozgatható koordináta-rendszer, amelyet olyan berendezések, mint a berendezési tárgyak, munkapadok ábrázolására használnak. Az origó és a tengelyek tájolása a helyszíni követelmények alapján határozható meg, a munkaterületen belüli pontadatok mérése és a feladatok kényelmes elrendezése érdekében.
Szingularitás pontok
Amikor a robot a kartéziánus koordinátarendszerben mozog, a két tengely eredő sebessége nem lehet bármelyik irányban, ha az irányok egy vonalban vannak, ami azt eredményezi, hogy a robot szabadságfokai romlanak.
A robot három szingularitás ponttal rendelkezik.

